Projekty
Projekt PHAND
Opublikowano: 18 luty 2019
Wykonawcy projektu: Hubert Kacprowicz oraz Piotr Korczak
CEL I MOTYWACJA
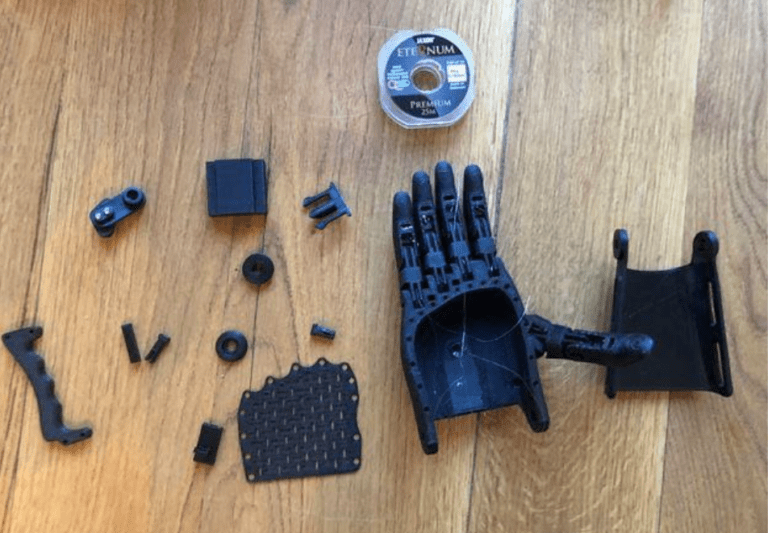
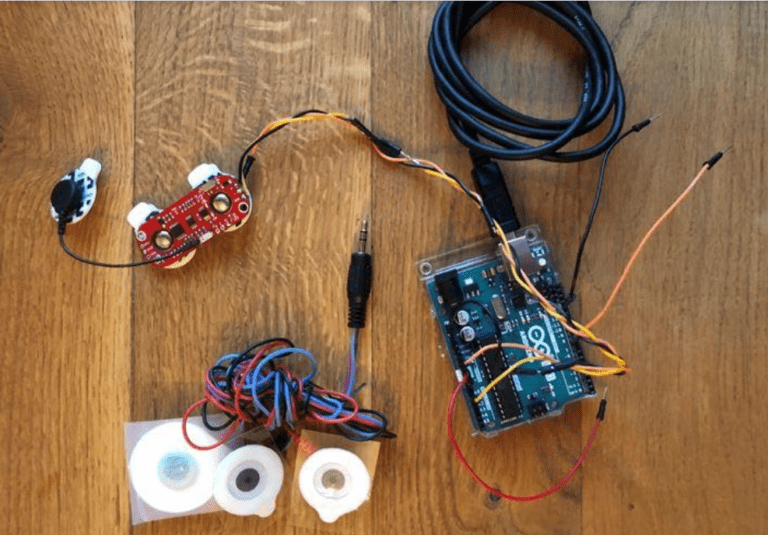
Celem projektu jest zaprojektowanie i wykonanie ręki 3D sterowaną za pomocą czujników biomedycznych EMG. Za kryterium przyjmuje się zaprojektowanie “protezy”, której koszt nie będzie przekraczał 500 zł. Takie obniżenie kosztów pozwoliłoby osobie bardzo młodej, niepełnosprawnej przyzwyczajenie się od najmłodszych lat do korzystania z protezy. PHAND składa się z trzech głównych części. Pierwszą z nich jest wydrukowana w częściach “ręka” w technologii druku 3D oparta na rozwiązaniu open source o nazwie RAPTOR. Druga z nich to część elektroniczna, składająca się z czujników EMG oraz modułu głównego ARDUINO UNO. Natomiast trzecia to program napisany w specjalnie stworzonej aplikacji dostosowanej do obsługi Arduino.
ROZWIĄZANIA
Sygnał wysłany z mięśnia przedramienia użytkownika, generowany powyżej dostosowanej wielkości, aktywuje mechanizm zwijania. Ten, uruchamiany jest przez mikrokontroler znajdujący się w module głównym, który zaprogramowano tak, aby uruchomić np. silnik krokowy. Zwinięcie elementu powodowałoby, dzięki użytym wcześniej w konstrukcji żyłki wędkarskiej, przeniesienie sił na “paliczki dalsze”. Cały mechanizm umożliwiłby w ten sposób osobie niepełnosprawnej podstawową funkcję chwytną dłoni.
Opis rozwiązania mechanizmu i elektroniki wraz z napotkanymi problemami
Rozwiązania & Problemy:
Część 1.
1. Zaprojektowanie poszczególnych elementów w CAD.
2. Wydrukowanie w technologii 3D.
3. Złożenie poszczególnych elementów.
Problem do rozwiązania: Dobranie odpowiedniej grubości nici, tak aby wytrzymała zwijanie i była łatwa w montażu
Część 2.
1. Wybranie wszystkich elementów i ich zakup.
2. Podłączenie elektroniki.
Problem do rozwiązania: Dostosowanie elementu służącego do zwijania. Pomysłem numer jeden był silnik krokowy, natomiast tutaj pojawia się również problem odwijania.
Część 3.
1. Napisanie programu umożliwiającego uruchomienie mechanizmu zwijania.
Problem do rozwiązania: Dostosowanie wartości. Wyszukanie sposobu kalibracji do każdego użytkownika.
Dalsze postępowanie
W przyszłości chcielibyśmy skupić się na ulepszeniu działania ręki tzn. uświetnić sterowanie palców za pomocą większej liczby czujników oraz silniczków. Możliwe jest również zastąpienie wcześniej już wspomnianych silników silnikiem krokowym. Dalsze postępowanie objęłoby udoskonalenie samej konstrukcji mechanicznej oraz dobranie do niej jeszcze lepszych komponentów. Nadrzędnym celem będzie natomiast utrzymanie się w założonych widełkach cenowych tak, aby w przyszłości produkt był dostępny dla każdego.