Projekty
Proteza częściowa kończyny górnej sterowana sygnałem EMG
Opublikowano: 12 czerwiec 2015
Wykonawcy projektu: Marek Piotrowski, Damian Żabiński
CEL I MOTYWACJA
Główną motywacją do podejmowania tematki związanej z zaopatrzeniem protetycznym ludzi jest faktyczne występowanie problemu braku ręki lub jej części w społeczeństwie. Częstą przyczyną występowania tego rodzaju niepełnosprawności są wypadki w zakładach pracy, wypadki komunikacyjne, niewykształcenie się bądź niepełne wykształcenie się ręki powodowane wadą wordzoną u dzieci. Osoby z takim problemem często mają ograniczony stopień samodzielności, są wyłączone z wykonywania wielu czynności i mogą czuć się przez to odrzucane przez społeczeństwo. Na szczęście dzisiejszy stan wiedzy technicznej jak i medycznej umożliwia wytworzenie nie tylko protez biernych stosowanych w celach estetycznych, a implementowanie u pacjentów rowiązań pozwalających na poruszanie palcami czy chwytanie przedmiotów, poprzez napinanie odpowiednich mięśni w kikucie przedramienia.
Celem projektu realizowanego przez dwóch członków naszego koła jest przejście przez wszystkie kolejne etapy projektowania i wytwarzania częściowych protez kończyny górnej sterowanej sygnałami mięśniowymi. Dzieki zagłębieniu się w cały proces projektowo-wytwórczy możliwe będzie wskazanie głównych problemów z jakimi musi poradzić sobie inżynier w celu osiągnięcia postawionego celu. Przedstawione zostaną własne pomysły i koncepcje na każdym z etapów realizacji takiego typu zaopatrzenia protetycznego.
OPIS PROJEKTU
Przed przystąpieniem do części projektowej należało rozpoznać temat od strony biomechaniki dłoni, ponieważ kształt zaprojektowanych elementów powinien pozwalać na ruch tylko w określonych kierunkach i zakresach kątowych, tak jak występuje to w przypadku ludzkiej dłoni. Wymiary paliczków i części dłoniowej dobrano na podstawie atlasu antropometrycznego, w którym to znajdują się poszczególne dane miar człowieka uśrednione dla populacji.
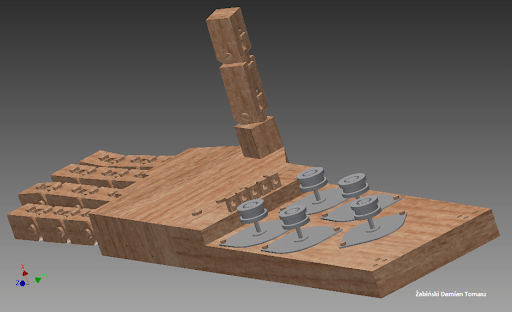
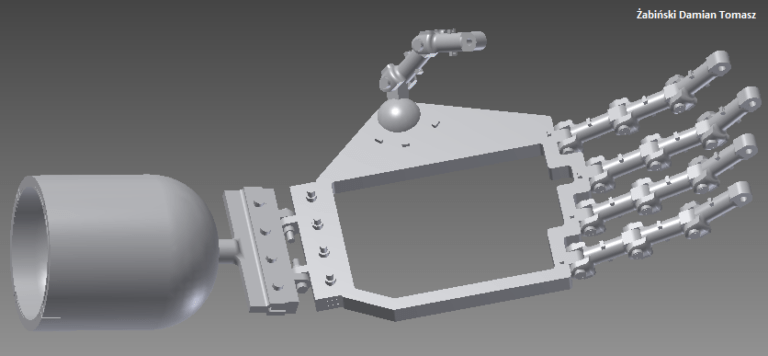

Prototyp protezy zaprojektowanej w programie Autodesk Inventor został wykonany z drewna. Pozwoliło to na dostrzeżenie komplikacji mogących pojawić się podczas wytwarzania poszczególnych elementów oraz dokładnie przeanalizowano czy konstrukcja łączonych części pozwala na założone zakresy ruchów w stawach. Dzięki temu udoskonalono zaproponowany projekt jeszcze przed głównym procesem wytwarzania. Oprócz drewnianych paliczków i części dłoniowej prototyp składa się z ścięgien w postaci żyłki wędkarskiej, elemntów łączących, sprężyn oraz pięciu silników krokowych umożliwiających ruch poszczególnych palców. Jak się okazało jednym z trudniejszych aspektów do odwzorowania był ruch kciuka, który naturalnie porusza się w kilku kierunkach, dlatego też jak do tej pory przewidziano tylko jeden kierunek ruchu dla tego elementu (do wnętrza dłoni).
TECHNOLOGIA WYTWARZANIA
Docelowo elementy konstrukcji mają zostać wydrukowane w technologii FDM z tworzywa ABS, aby w ten sposób wykonać modele do wytworzenia form odlewniczych. Zdecydowano się na takie rozwiązanie ze względu na rozmiar i szczegółowość elemntów, która może być ciężko osiągalna innymi metodami. Planowanym materiałem do ostatecznego odlania elementów jest aluminium. Kolejnym krokiem będzie obróbka wykańczająca oraz złożenie konstrukcji.
STEROWANIE
Substytutem mięśni w tym projekcie ma być proste mechaniczne połączenie żyłek z elementami konstrukcji, które to następnie są nawijane i rozwijane przy użyciu silników krokowych. Silniki te poprzez odpowiednio skonstruowaną i zaprogramowaną płytkę będą sterowane sygnałem mięśniowym pobieranym za pomocą elektrod powierzchniowych, które powszechnie stosuje się w badaniach elektromiograficznych. W ramach tego projektu autorzy zaproponują własną koncepcję płytki oraz programu sterującego.
Pierwszym elementem, który został wykonany w celu zrealizowania sterowania projektowaną protezą jest sterownik do silnika (mostek H). Jego zadaniem jest sterowanie kierunkiem obrotu silnika prądu stałego, ale w tym wypadku posłuży do obsługi silników krokowych bipolarnych.
PRZEWIDYWANE EFEKTY KOŃCOWE
W wyniku opisanego powyżej projektu powstanie proteza ręki, której ruchy będą mogły być sterowane przez dowolnego użytkownika po uprzednim podłączeniu zestawu elektrod powierzchniowych. Otrzymaną protezę będzie można oglądać podczas akcji promocyjnych uczelni oraz w Laboratorium Biomechaniki.
Realizacja takiego projektu z całą pewnością wzbogaci wykonawców oraz osoby odwiedzające Laboratorium w wiedzę na temat sposobu działania tego typu rozwiązań protetycznych oraz problemów związanych ze sterowaniem i wytwarzaniem poszczególnych elementów.
Koło naukowe BTS „Da Vinci” na rzecz realizacji opisanego projektu w maju 2015r. otrzymało grant.